Embedded motion stack
Main-board firmware coordinates motion, device state, and update handoff for classroom and lab deployments.
Robotics platform engineering
Cork Robotics develops hardware, firmware, and desktop tooling for programs that need repeatable robot setup, field updates, and reliable classroom deployment.
Platform
The system is organized around durable hardware, clear release channels, and software that lets instructors and students spend more time working with robots and less time recovering from setup drift.
Main-board firmware coordinates motion, device state, and update handoff for classroom and lab deployments.
Sensor firmware is versioned independently so field fixes and experiments can ship without disrupting the main controller.
Apps check release manifests on launch and guide users through firmware and desktop software updates.

corkBot V0
A portable, standalone robotic core built around closed-loop servo motion, modular tool heads, and quickly attachable submodules for changing use cases.
Development previews
Current renders show the corkBot V0 core and the submodules being developed around its fast-swap mechanical interface, power, and control architecture.
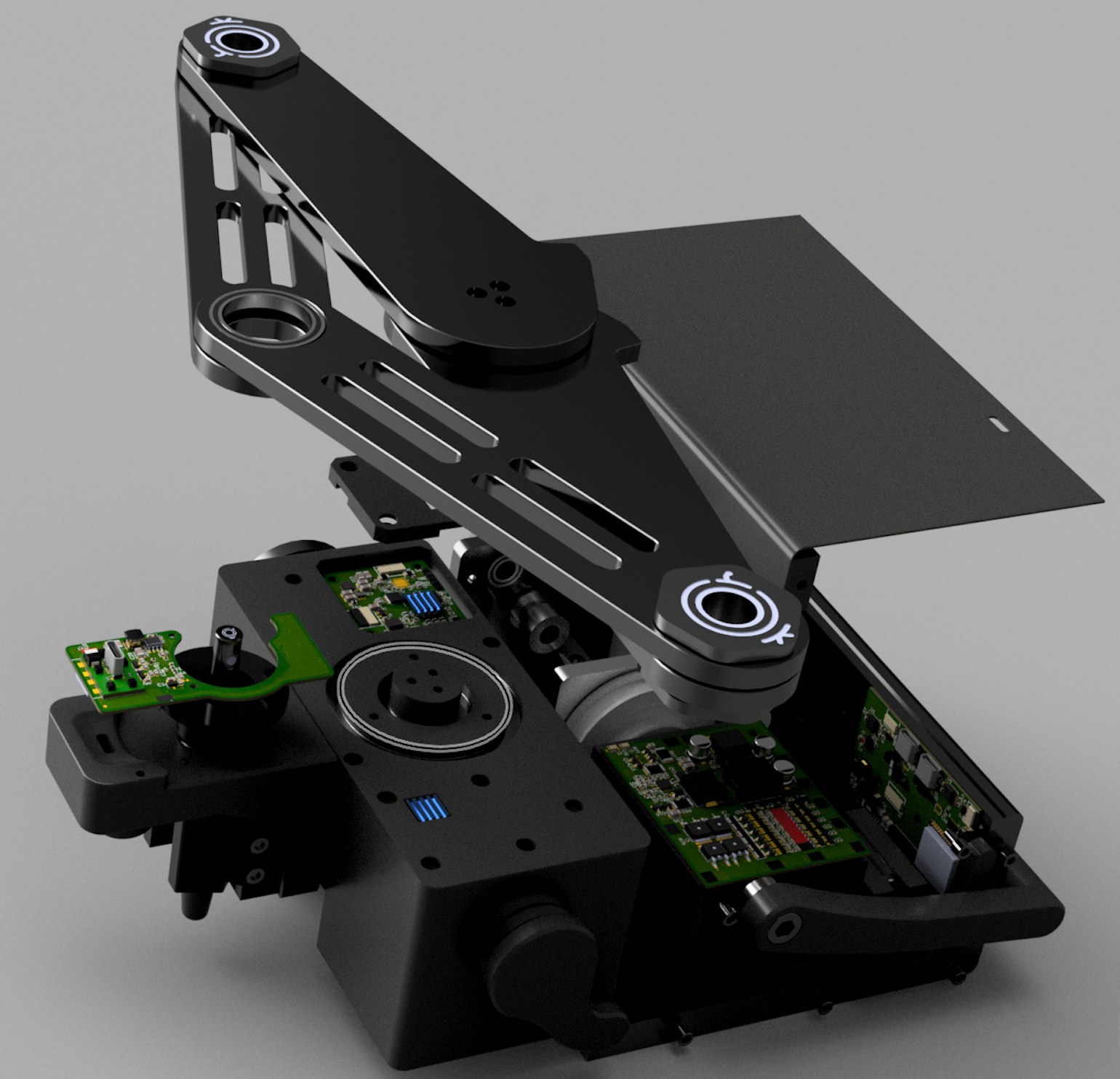
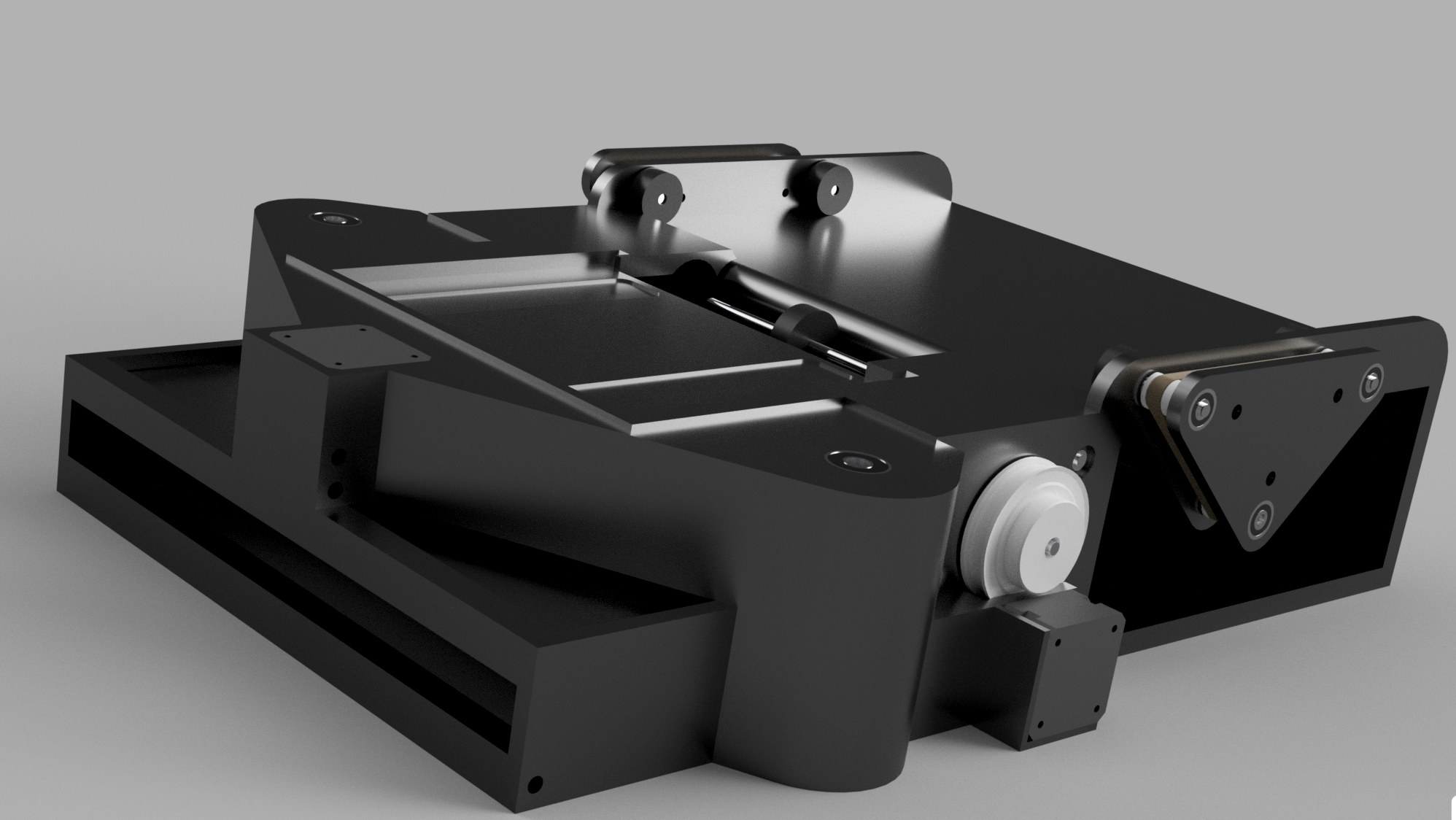
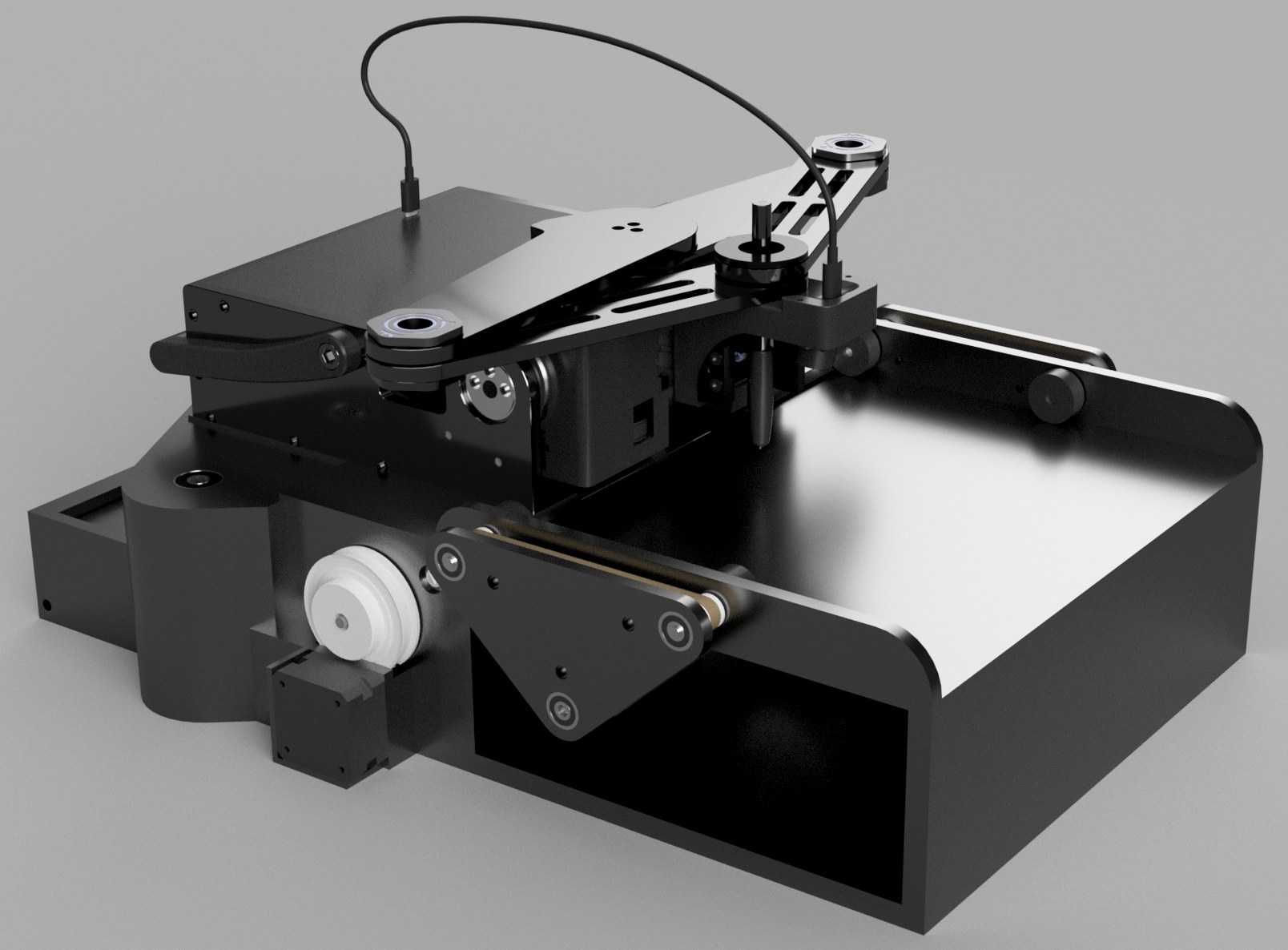
Internal architecture and mechanical stack for the portable corkBot V0 core.

Manual plotting sensor tool head equipped for desktop writing, drawing, and calibration workflows.
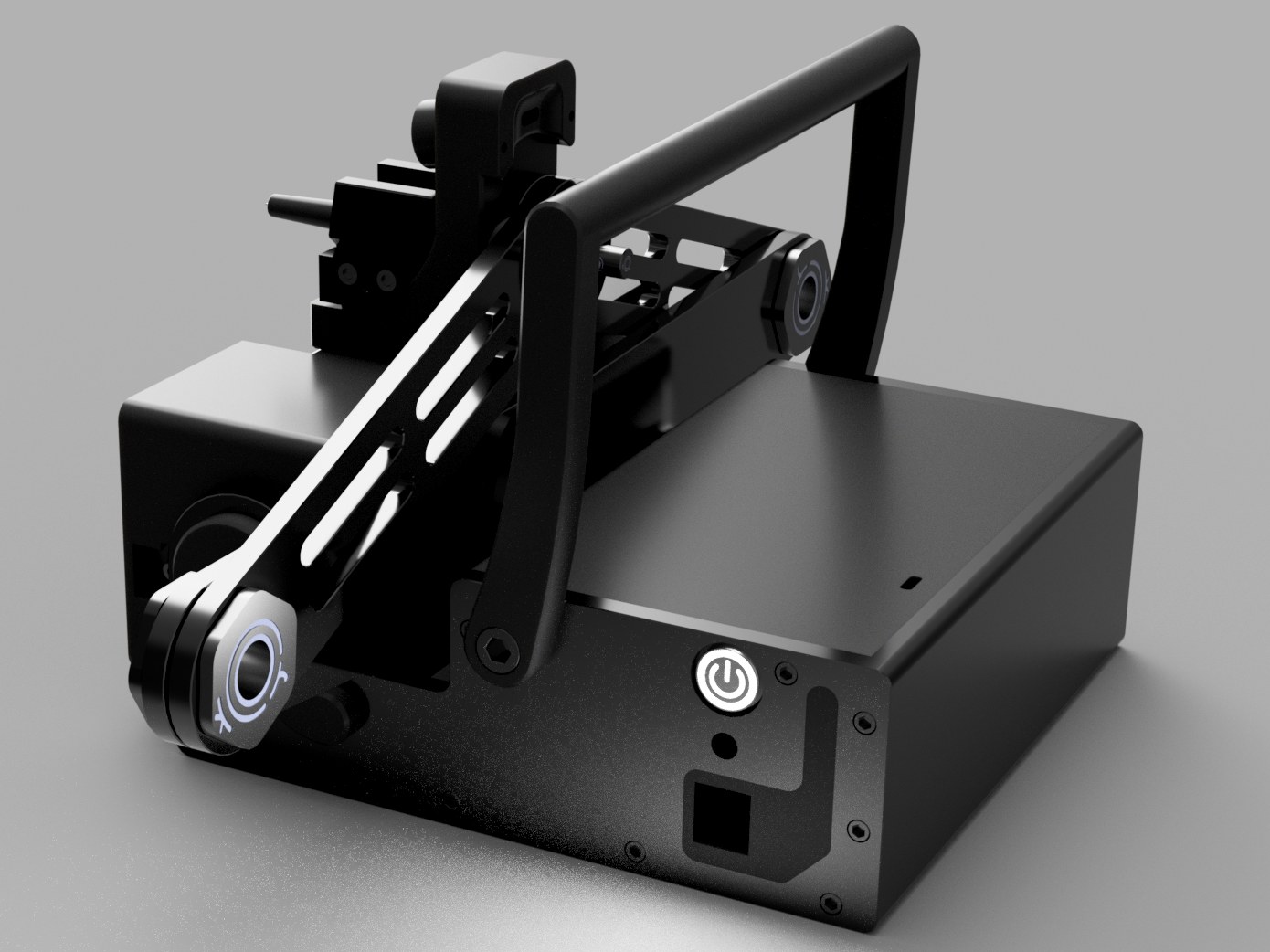
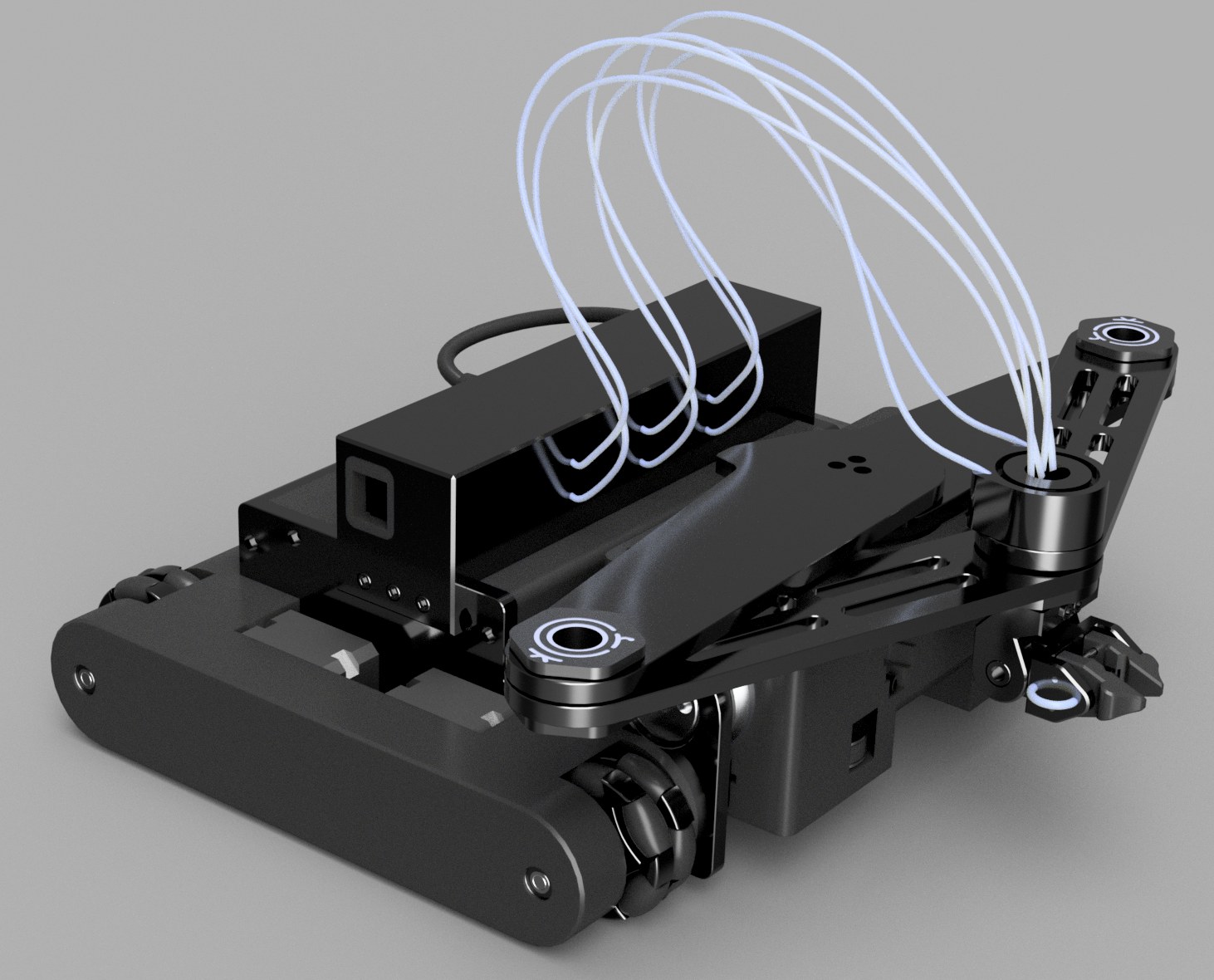
Compact folded posture for moving the robot between desks, classrooms, labs, and field demos.
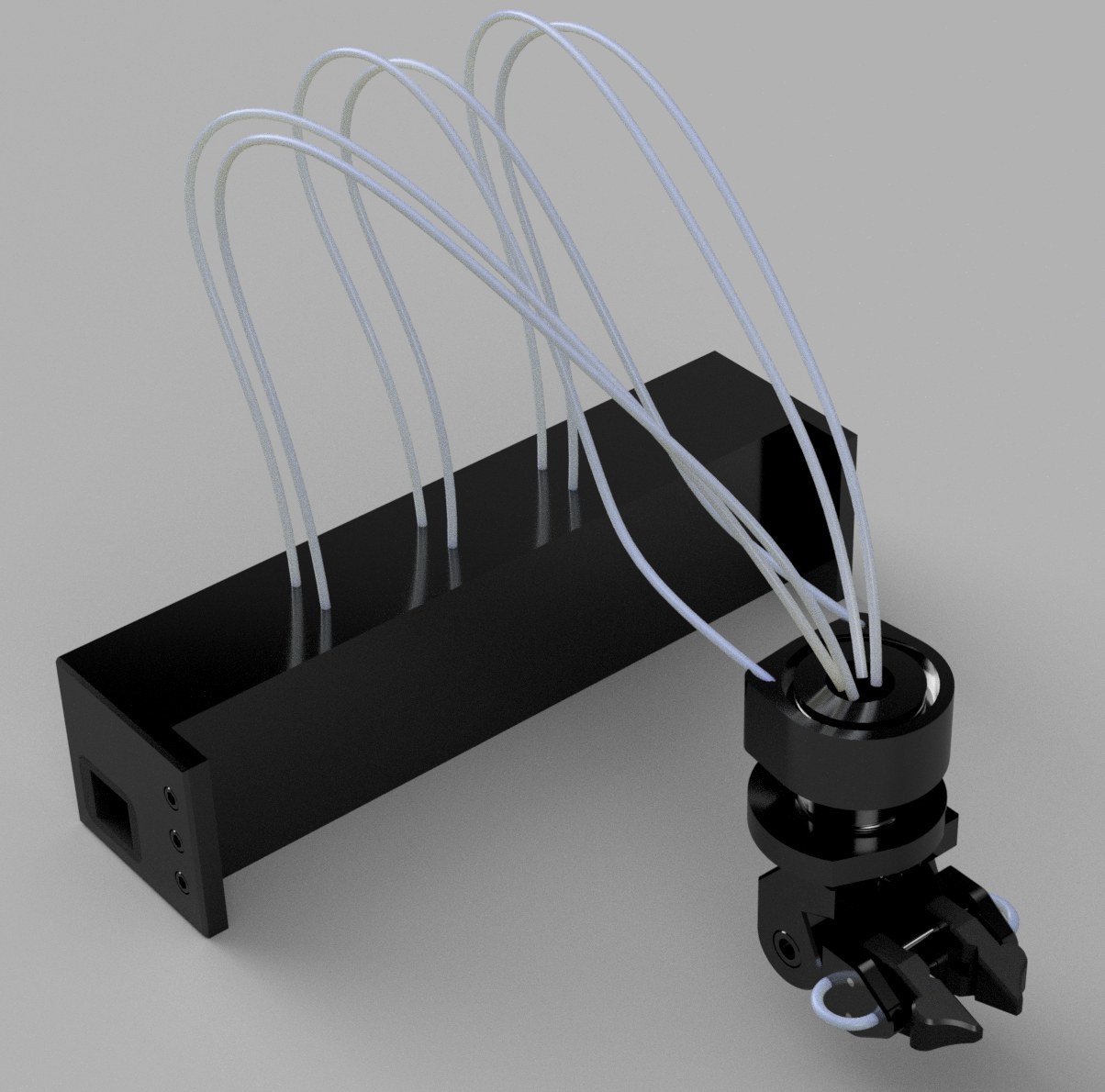
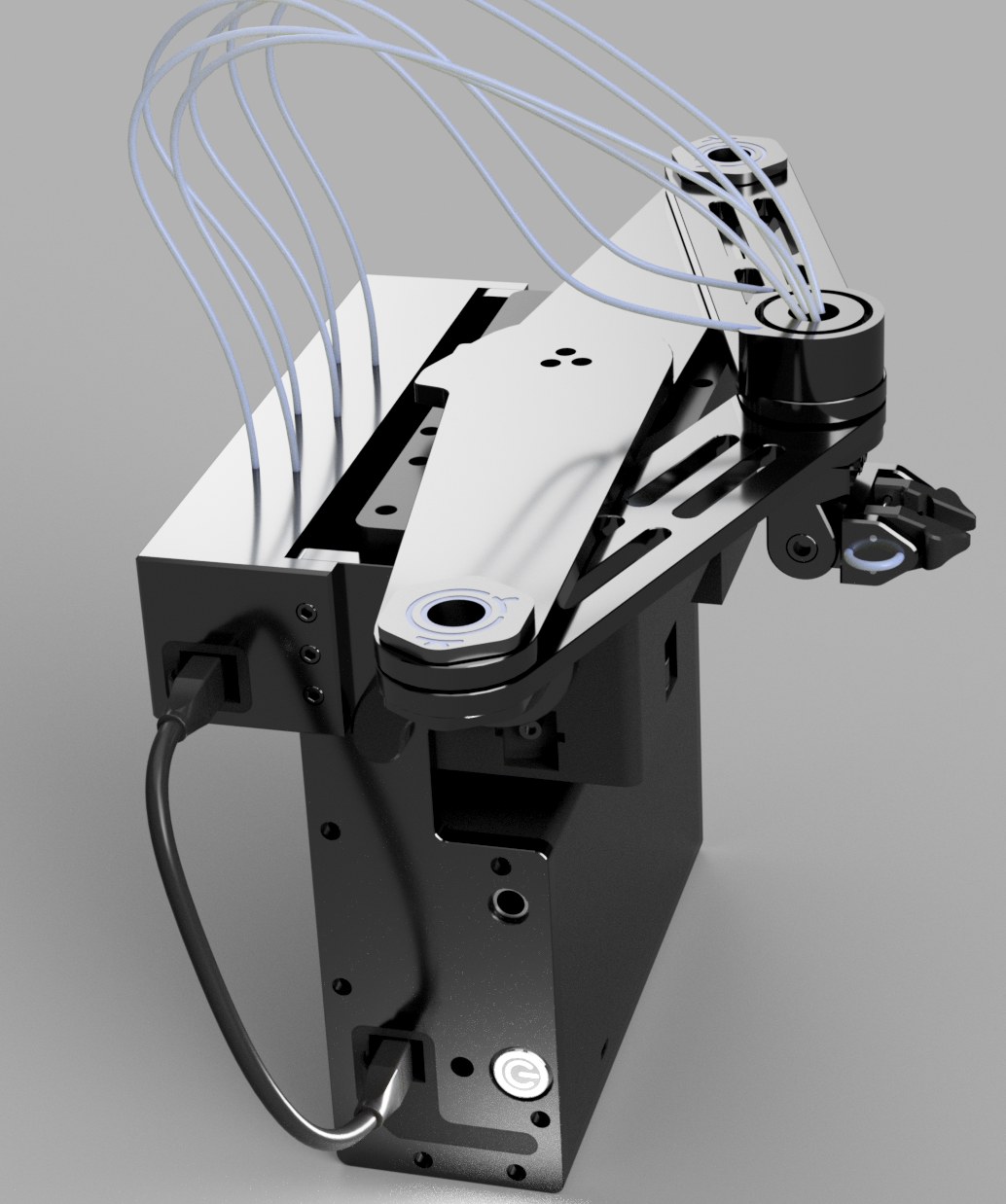
Gripper tool head with its accompanying 3-axis motor mount module for controlled positioning.
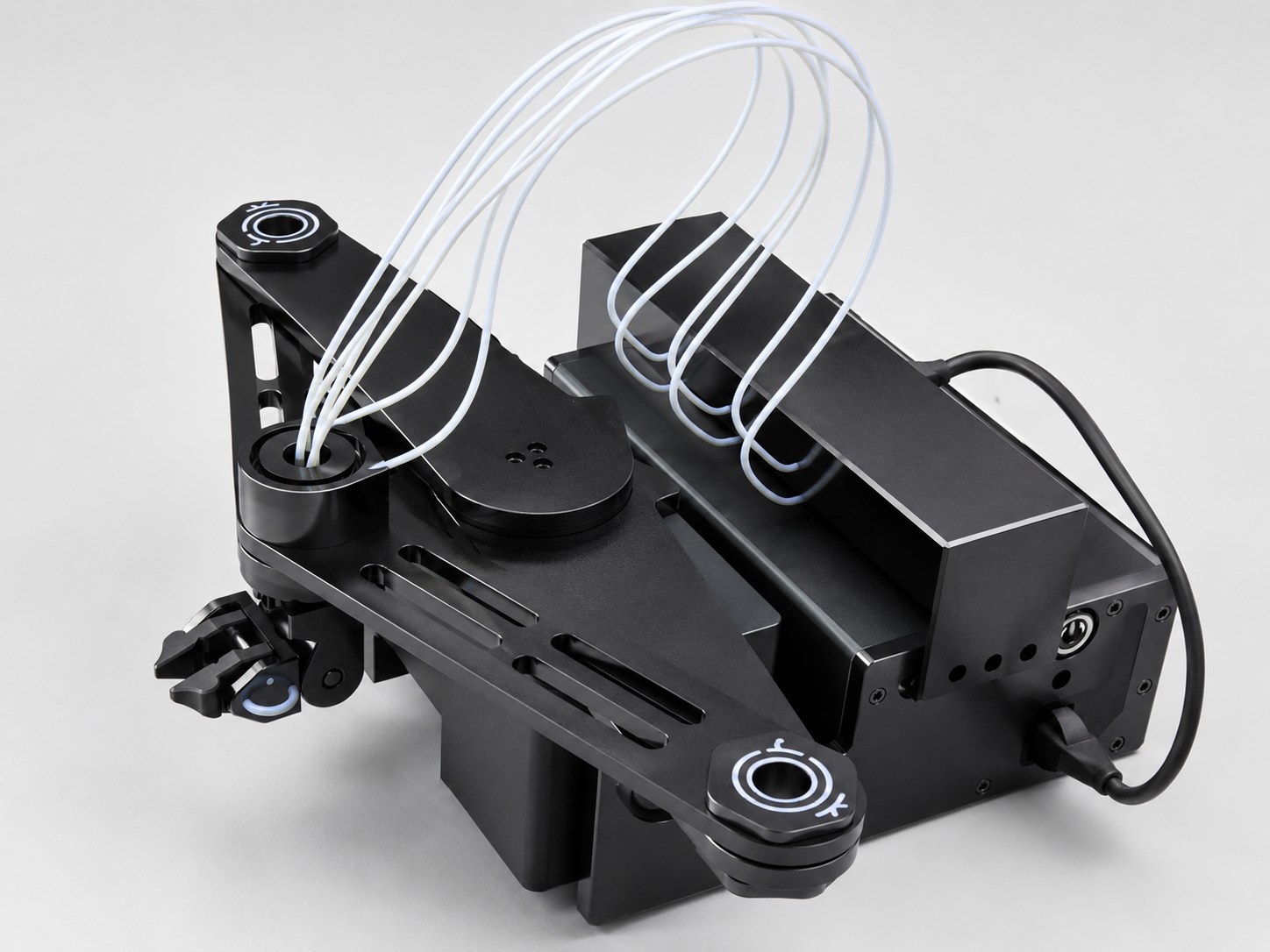
corkBot configured horizontally with the mounted 3-axis gripper tool head.
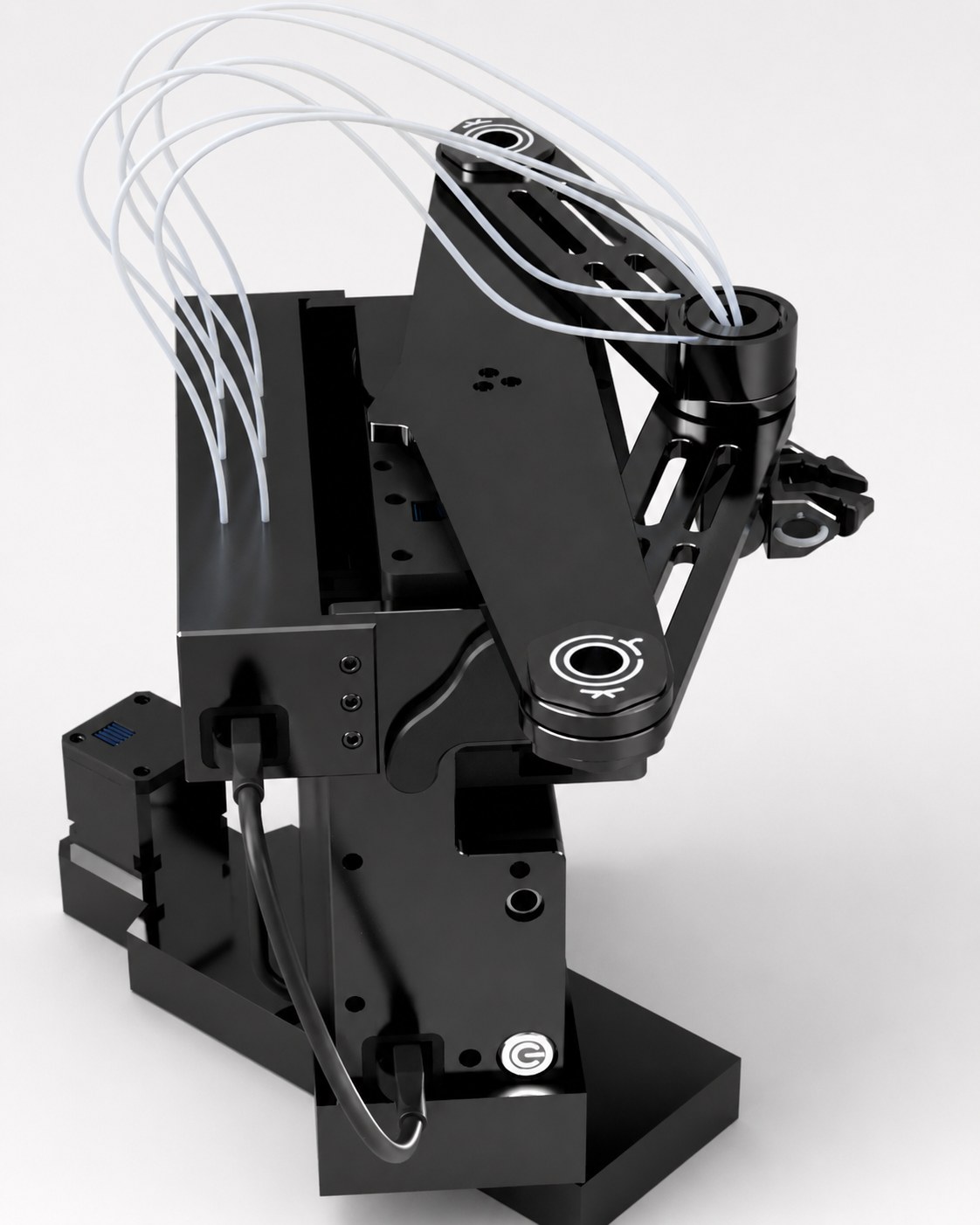
Upright orientation with the 3-axis gripper tool head for alternate reach and clearance tests.

Omnidirectional base module for moving the corkBot platform in the X/Y plane.
corkBot mounted on the mobility submodule with the 3-axis gripper attached.

Fixture-style rotating base for expanding positioning and workholding scenarios.
corkBot mounted on the rotating base with the 3-axis gripper tool head attached.
Paper handling module concept for automating repeated handwritten output.
Mounted setup for larger handwritten-letter runs, including business mail workflows such as real estate outreach.
Modular tool heads
The machine ships with the standard pen tool head as its primary module. Additional tool heads are being developed around the same fast-swap interface so the platform can grow beyond plotting without changing the base machine.

Mobility submodule
A plug-and-play wheel submodule is being explored for programs that need the main robot unit to move freely in the X/Y plane. The current preview uses four individually controllable omnidirectional wheels and a 24V 3Ah battery pack.
This is not the final form. The wheel unit layout and integration details are expected to evolve before production release.


Operating environments
Fast setup, repeatable recovery, and update checks that keep shared devices on the same version.
Versioned firmware and hardware channels for controlled experiments and hardware iteration.
Clear manifests, checksums, and release artifacts for controlled device software rollouts.
In development
Current product channels are being prepared for launch. Public downloads will appear as production firmware and app builds are published.
Launch readiness
Firmware and desktop releases will be distributed through versioned manifests, immutable artifacts, and checksum validation so apps can offer updates with confidence once production builds are published.